

امروز : سه شنبه, ۲۹ خرداد , ۱۴۰۳
پایداری | متن کامل رایگان | تشخیص رابطه بصری تک شات برای شناسایی دقیق خطرات تماس محور در ساخت و ساز دیجیتالی پایدار
۱٫ معرفی صنعت ساخت و ساز به طور فزاینده ای توجه خود را به اتوماسیون رباتیک و دیجیتالی کردن (یا دوقلوسازی دیجیتال) معطوف می کند که با وعده بهبود بهره وری سرمایه و راه حلی برای کمبود فزاینده نیروی کار جلب شده است. تغییرات اخیر در بازار شواهد قوی برای این تغییر ارائه می دهد. […]

۱٫ معرفی
علیرغم پتانسیل تشخیص ارتباط بصری مبتنی بر DNN، این منطقه از جامعه تحقیقاتی متمرکز بر ساخت و ساز توجه کمی به خود جلب کرده است. در این مطالعه، ما سه مدل DNN را برای تشخیص رابطه بصری آموزش داده و ارزیابی میکنیم، که هر یک از آنها سطح دشواری کار متفاوتی دارند، و بررسی پتانسیل آنها برای تشخیص دقیق رابطه بصری تکشات در سطوح دشواری به تدریج افزایش مییابد.
۲٫ توضیح و دامنه این مطالعه
۲٫۱٫ استفاده از هوش مصنوعی بصری مبتنی بر DNN برای شناسایی خطر در محل
۲٫۲٫ تمرکز اصلی: خطرات تماس محور مربوط به تجهیزات سنگین/روبات ها
۲٫۳٫ تجهیزات سنگین ساخت و ساز/روبات به عنوان منبع هدف اصلی خطر
ما یک روند عمده را مشاهده کردیم که در آن، برای تجهیزات سنگین ساختمانی، تلاشهای تحقیق و توسعه شرکتهای اصلی OEM بر مقاومسازی ماشینهای موجود در روباتهای نیمه مستقل یا کاملاً مستقل با افزودن یک کیت سختافزاری تجسمشده با هوش مصنوعی متمرکز شده است، در حالی که ساختار مکانیکی اصلی خود را حفظ میکند. و ظاهر در نتیجه، ما میتوانیم انتظار داشته باشیم که روباتهای ساختوساز آینده، بهویژه تجهیزات خاکبردار مانند بیلهای مکانیکی، لودرهای چرخدار یا جرثقیلها، ساختار و ظاهر یکسانی را حفظ کنند، در حالی که با هوش مصنوعی برای اتوماسیون کار بهبود مییابند. اگرچه این تحقیق با تجهیزات سنگین موجود انجام شده است، اما با توجه به حقایق بالا، نتایج مطمئناً برای تجهیزات ساختمانی نیمه مستقل یا کاملاً مستقل نیز قابل استفاده خواهد بود.
در ابتدای این مطالعه، ما اذعان کردیم که توسعه یک مدل جامع که بتواند انواع تجهیزات سنگین را پوشش دهد، امکان پذیر نیست، زیرا به تعداد زیادی تصاویر و برچسب های آموزشی متنوع نیاز دارد. از آنجایی که هدف این مطالعه توسعه یک مدل قابل استفاده میدانی برای مصارف صنعتی نبود، بلکه بررسی پتانسیل مدلهای بینایی کامپیوتری تک شات بود، ما تمرکز خود را به بیلهای مکانیکی و کارهای خاکبرداری محدود کردیم، که مهمترین منابع در نظر گرفته میشوند. و وظایف در بسیاری از پروژه های ساختمانی بزرگ. انجام این تحقیق ما را در تعیین مسیرهای صحیح تحقیقاتی آینده برای این حوزه راهنمایی خواهد کرد و مطمئن باشید یافته ها همچنان در سایر انواع تجهیزات قابل اجرا خواهند بود، زیرا اصول اولیه مدل ها از نظر آموزش و استنباط صحنه های بصری ثابت خواهند ماند.
۳٫ نیاز به تشخیص رابطه برای شناسایی دقیق خطرات تماس محور
۳٫۱٫ خطر حوادث تماس محور در ساخت و سازهای رباتیک
۳٫۲٫ پیشگیری از تصادفات بر نظارت بر مجاورت متمرکز شده است
۳٫۳٫ نیاز به تشخیص رابطه
در حالی که نزدیکی عاملی برای تصادفات تماس محور است، تنها تکیه بر نزدیکی هنگام شناسایی یک خطر در عمل ناکافی است. در ساخت و ساز، نزدیکی بین یک کارگر و یک شی متحرک می تواند به طور ناخواسته ایجاد شود، اما همچنین می تواند به طور طبیعی در هنگام همکاری (عمداً در تعامل) اتفاق بیفتد. به عنوان مثال، دو مورد ساده را در نظر بگیرید: (۱) یک آجرکار ناخواسته وارد شعاع عمل یک بیل مکانیکی مستقل شده است. و (ii) یک آجرکار در حال تکمیل اتصالات ملات بلافاصله در کنار یک ربات بنایی نیمه مستقل که آجرها را روی هم انباشته می کند. مورد اول مطمئناً خطری است که در آن مداخله فوری لازم است. در مقابل، دومی اینطور نیست، زیرا این نهادها برای همکاری در فاصله نزدیک و نزدیکی در نظر گرفته شده است. همانطور که این مثال ها نشان می دهند، مجاورت به تنهایی برای تعریف دقیق خطرات در یک محیط ساخت و ساز کافی نیست. علاوه بر این، لازم است که رابطه بین کارگر و شی، از جمله و به ویژه اینکه آیا آنها با هم کار می کنند یا خیر، در نظر گرفته شود. بدون تشخیص رابطه، یک سیستم تشخیص خطر که صرفاً بر شناسایی خطر مبتنی بر مجاورت متکی است، منجر به مزاحمتهای مکرر و توقف عملیات میشود و بر بهرهوری تأثیر منفی میگذارد. این رویکرد نه منطقی است و نه پایدار. به این ترتیب، اهمیت تشخیص رابطه در محیط های ساخت و ساز رباتیک که در آن کارگران و روبات ها به طور فزاینده ای در کنار یکدیگر کار می کنند، افزایش خواهد یافت.
۳٫۴٫ رویکردهای قبلی برای تشخیص رابطه بین اشیاء ساختمانی
۴٫ تشخیص ارتباط بصری تک شات مبتنی بر شبکه عصبی عمیق
در این مطالعه، ما سه مدل با افزایش سطوح دشواری کار را توسعه دادیم، در نتیجه پتانسیل تشخیص رابطه تک شات مبتنی بر DNN را به صورت مرحلهای بررسی کردیم.
بقیه این بخش (i) معماری شبکه را شرح می دهد. (ii) مجموعه دادههای قبل از آموزش، تنظیم دقیق و آزمایش. (iii) فرآیند تنظیم دقیق؛ و (IV) معیار ارزیابی.
۴٫۱٫ Pixel2 Graph
-
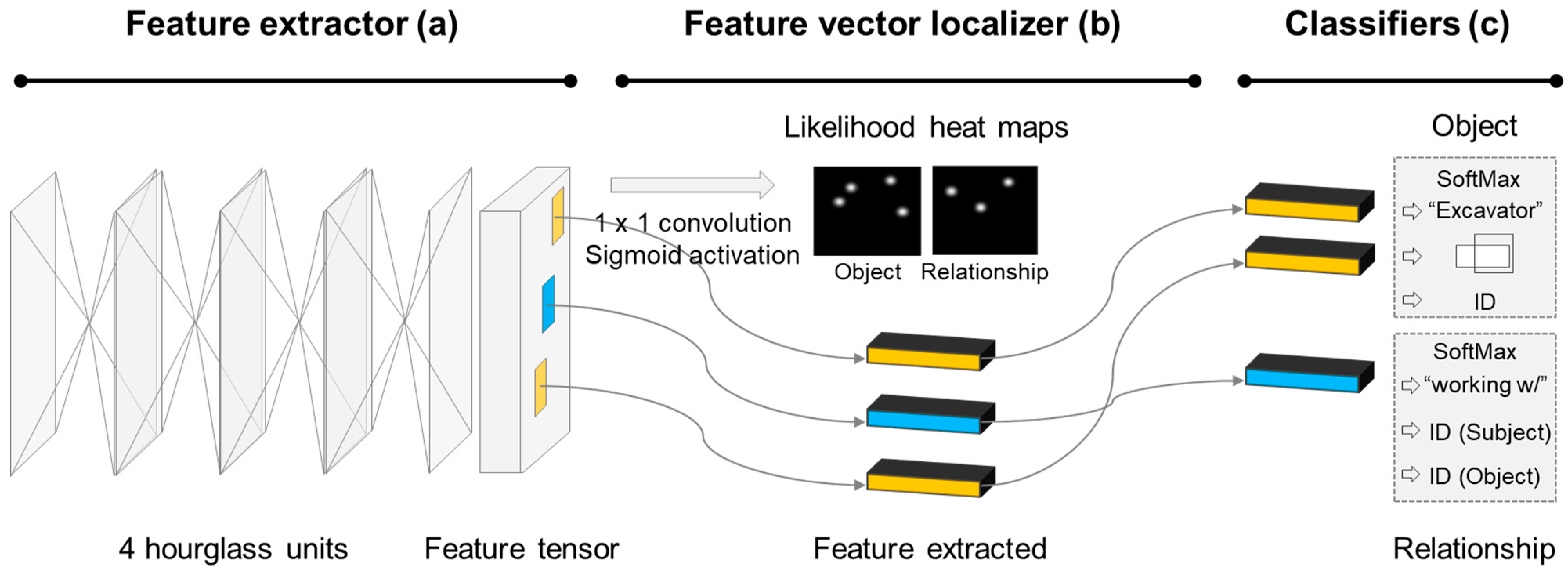
استخراج کننده ویژگی (شکل ۳الف): چهار واحد شبکه ساعت شنی که در یک ردیف روی هم چیده شدهاند، یک تصویر کامل را به عنوان ورودی میگیرند و ویژگیهای معنیداری را از ورودی بدون ساختار (یعنی تصویر دو بعدی) به یک تانسور ویژگی سه بعدی با اندازه ثابت استخراج میکنند. یک واحد شبکه ساعت شنی از چندین لایه کانولوشن با اندازه های مختلف با اتصالات پرش تشکیل شده است که امکان رمزگذاری و رمزگشایی استخراج ویژگی را فراهم می کند. [۷]. با تکرار فرآیند انتزاع منسجم، استخراجکننده ویژگی هم ویژگیهای کلی (مثلاً ارتباط بین اشیاء پسزمینه و پیشزمینه) و هم ویژگیهای محلی (مثلاً ارتباط بین اشیاء پیشزمینه) را در یک تانسور ویژگی سه بعدی جمعآوری میکند که میتواند برای تشخیص رابطه مفید باشد. و همچنین برای تشخیص اشیا [۷].
-
بومی ساز بردار ویژگی (شکل ۳ب): سپس بومی ساز بردار ویژگی، مکان های بالقوه اشیاء و روابط آنها را بر روی مختصات تصویر با تجزیه و تحلیل تانسور ویژگی سه بعدی مشخص می کند. بومی ساز بردار ویژگی، نقشه های حرارتی احتمال اشیاء و روابط آنها را به طور مستقل از طریق پیچیدگی ۱ × ۱ و فعال سازی سیگموئید ایجاد می کند، که در آن هر مقدار حرارت نشان دهنده احتمال وجود یک موجودیت (یعنی شی یا رابطه) در مکان داده شده است. [۷]. بر اساس مکان های مشخص شده، بردارهای ویژگی مربوطه مورد علاقه انتخاب و تجزیه و تحلیل می شوند.
-
طبقه بندی (شکل ۳ج): بردارهای ویژگی مربوطه به لایه کاملاً متصل و طبقهبندیکننده Soft-Max وارد میشوند که در آن طبقهبندیهای نهایی: (i) کلاس موضوعی (مثلاً کارگر)، (ii) رابطه (مثلاً راهنما) و (iii) کلاس شی (به عنوان مثال، یک بیل مکانیکی) ساخته شده است.
۴٫۲٫ جمع آوری و حاشیه نویسی داده های ساخت و ساز
۴٫۳٫ آموزش مدل های ساخت و ساز
مجموعه داده مشروح توسعه یافته برای این پروژه به دو مجموعه جداگانه از تصاویر تقسیم شد. مجموعه اول شامل ۱۱۰۸۲ تصویر (۸۹%) برای تنظیم دقیق و مجموعه دیگر شامل ۱۳۸۳ تصویر (۱۱%) برای استفاده برای تست ذخیره شد. در حالی که مجموعه داده ساخت و ساز را به این دو دسته تقسیم می کنیم، اطمینان حاصل کردیم که هیچ همپوشانی از نظر پس زمینه یا زمینه سایت وجود ندارد، بنابراین از تخمین بیش از حد احتمالی در آزمایش نهایی جلوگیری می کنیم.
در ابتدای این تحقیق، ما اذعان کردیم که تعداد و تنوع دادههای جمعآوریشده ممکن است برای دستیابی به بهترین عملکرد بالقوه از سه مدل کافی نباشد. با توجه به این، برای ارزیابی حداکثر پتانسیل عملکرد مدلهای آموزش دیده با دادههای موجود، ما ۸۹ درصد از دادهها را برای آموزش اختصاص دادیم، با این فرض که ۱۱ درصد باقیمانده (تقریباً ۱۵ ویدیو، هر کدام از یک سایت ساختوساز متفاوت) همچنان کافی هستند. برای آزمایش و تجزیه و تحلیل
۴٫۴٫ متریک ارزیابی
۵٫ نتایج و بحث
۵٫۱٫ مدل شماره ۱، OnlyRel: با Bboxes و کلاس های ارائه شده همراه با یک تصویر دو بعدی
۵٫۲٫ مدل شماره ۲، Cla-Rel: با Bboxes داده شده همراه با یک تصویر دو بعدی
۵٫۳٫ مدل شماره ۳، Loc-Cla-Rel تنها با یک تصویر ۲ بعدی
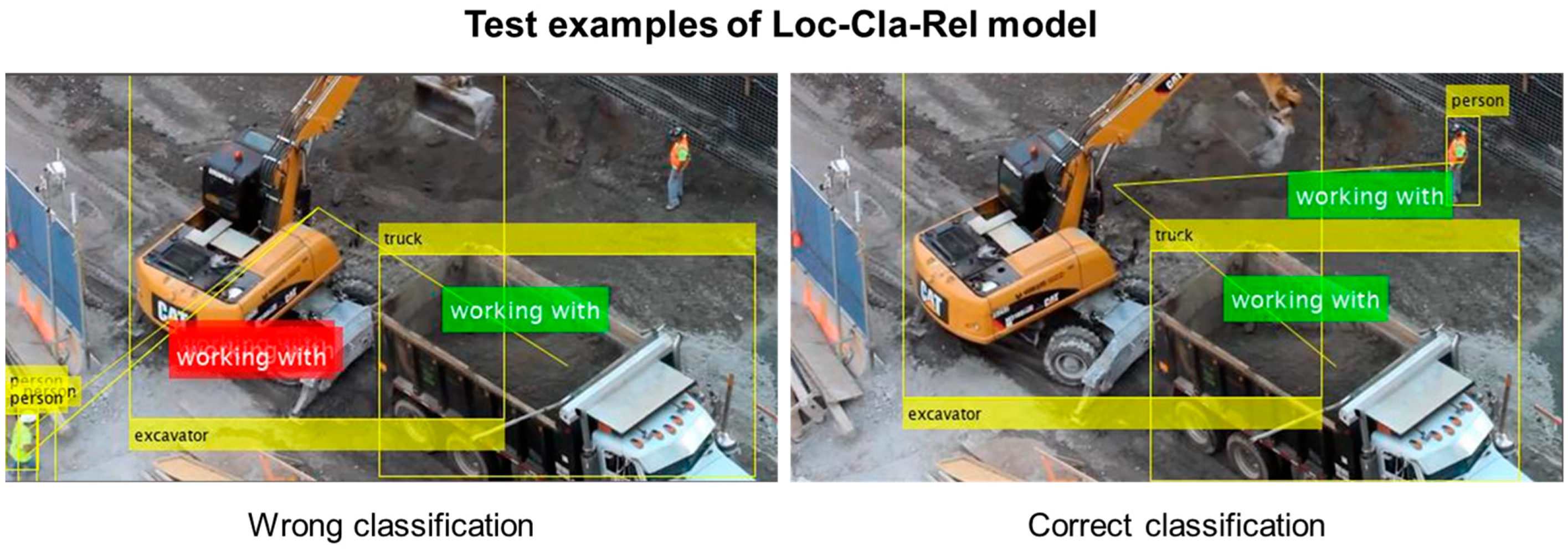
مدل Loc-Cla-Rel بالاترین سطح دشواری کار را دارد. بومی سازی bbox، طبقه بندی اشیا و تشخیص رابطه را به طور همزمان در یک شبکه انجام می دهد. مدل Loc-Cla-Rel، به بیان ساده، یک مدل دو در یک است که تشخیص شی (یعنی محلی سازی و طبقه بندی شی) و تشخیص رابطه را به طور همزمان انجام می دهد.
۵٫۴٫ محدودیتهای مطالعه کنونی و جهتهای تحقیقات آینده پیشنهادی
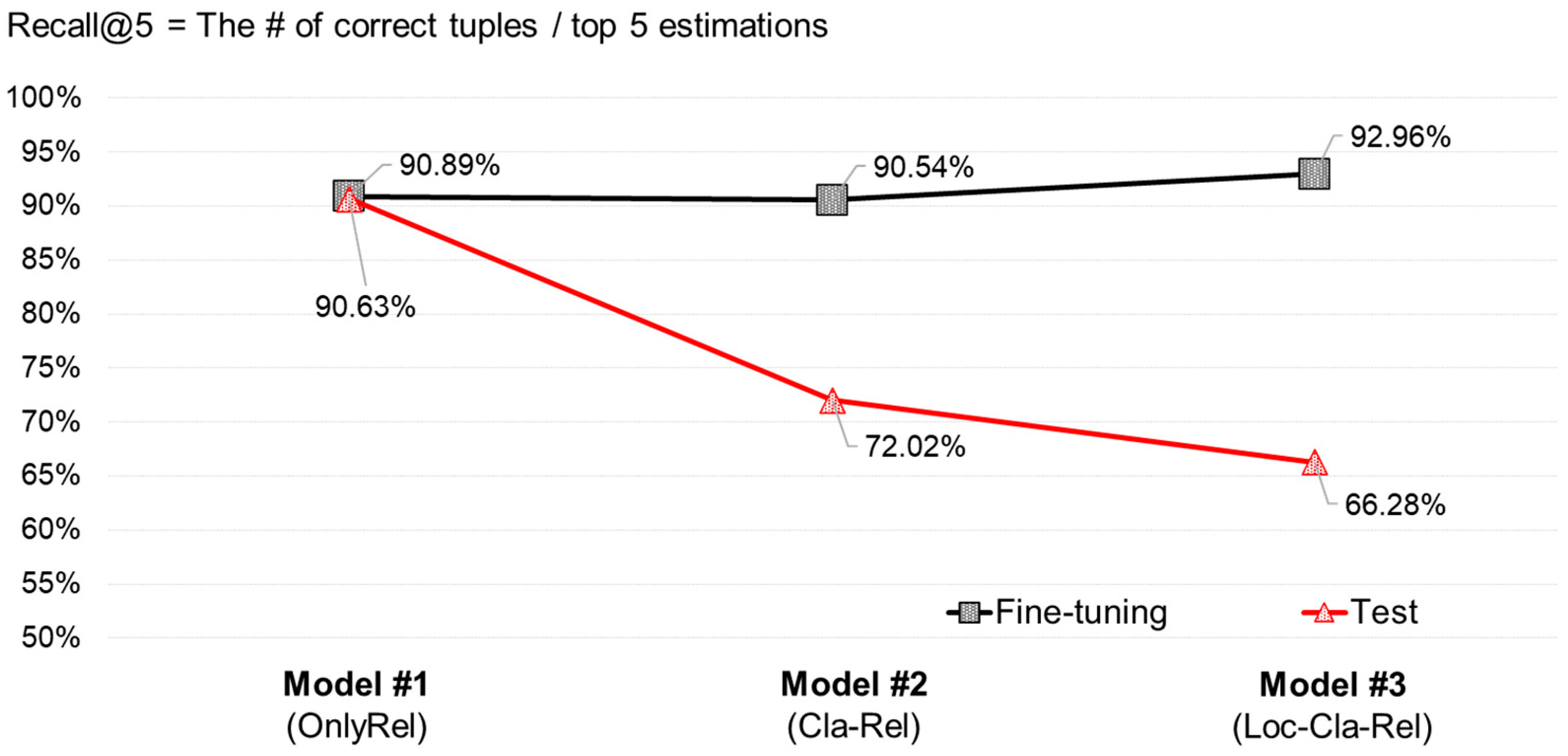
در حالی که پتانسیل تشخیص رابطه بصری مبتنی بر بینایی کامپیوتری، تک شات، تایید شد، همچنین مشهود بود که عملکرد سه مدل برای کاربردهای میدان واقعی کافی نیست. ۹۰٫۶۳% Recall@5 مدل شماره ۱ (OnlyRel) هنوز به اندازه کافی برای نظارت بر ایمنی نزدیک نیست، به غیر از مدل شماره ۳ (Loc-Cla-Rel)، با ۶۶٫۲۸% Recall@5. بر اساس این نتیجه آموزشی و با مقایسه الگوهای آموزش و دقت آزمون در دوره های آموزشی، نکات زیر را برای بهبود شناسایی کردیم:
-
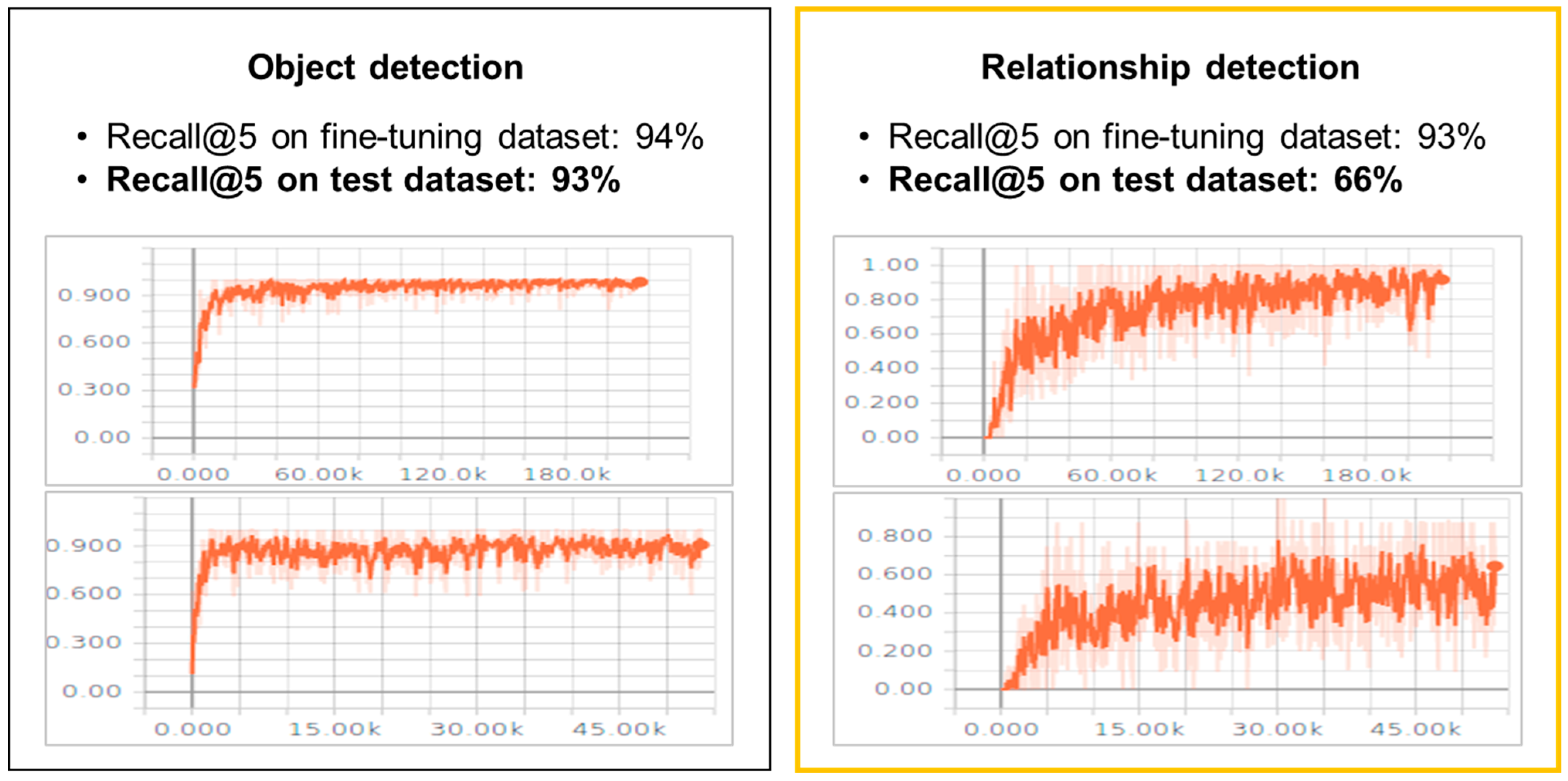
پرداختن به بیشبرازش با تعداد بیشتری از نمونههای آموزشی: اگرچه مدل (Loc-Cla-Rel) عملکردی رو به افزایش با مجموعه داده آزمایشی در طول تنظیم دقیق نشان داد، اما در مراحل اولیه شروع به همگرایی کرد.شکل ۶). واضح بود که یادگیری زمینه موقعیتی همراه با تشخیص اشیا چالش برانگیزتر است. به طور خاص، مشخص شد که آموزش موفقیت آمیز برای تشخیص دو در یک (یعنی تشخیص شی و رابطه) به حجم بیشتری از داده های تنظیم دقیق نسبت به OnlyRel (مدل شماره ۱) یا Cla-Rel (مدل) نیاز دارد. شماره ۲) مدل ها اختلاف قابل توجهی بین Recall@5s، که با استفاده از تنظیم دقیق و مجموعه دادههای آزمایشی به دست آمد، تأیید شد – یک علامت معمولی بیش از حد برازش (شکل ۶). Recall@5 به دست آمده توسط مدل Cla-Loc-Rel با استفاده از مجموعه داده های تنظیم دقیق حتی بالاتر از مواردی بود که با مدل های OnlyRel و Cla-Rel به دست آمد، که بیشتر روشن می کند که در طول تنظیم دقیق بیش از حد برازش وجود داشته است. با این حال، این نتیجه لزوما نشان دهنده حداکثر پتانسیل عملکرد یک مدل تشخیص رابطه تک شات نیست. ۹۲٫۹۶% Recall@5 از مجموعه داده تنظیم دقیق به وضوح نشان می دهد که این مدل قابلیت آموزش بالایی دارد اما به دلیل تعداد محدود داده های تنظیم دقیق و بیش از حد برازش در نتیجه، نمی تواند به حداکثر پتانسیل عملکرد خود برسد. ما پیشبینی میکنیم که یک مطالعه بعدی شامل مجموعه دادههای تنظیم دقیق که هم از نظر کمیت و هم از نظر تنوع افزوده میشود، عملکرد مدل Loc-Cla-Rel را بهبود بخشد. اخیراً، سنتز دادههای محاسباتی و برچسبگذاری خودکار با موتورهای شبیهسازی گرافیکی متنوع (مانند Blender، Unity، Omniverse) و مدلهای فیزیک پدیدار شدهاند. این رویکرد به ما امکان میدهد تا مجموعه دادههای خود را تحت شرایط تصویربرداری مختلف (مثلاً روشنایی، دیدگاه و مقیاس) ایجاد کنیم، که افزودهای ارزشمند برای مطالعات بعدی خواهد بود. هرچه داده های مصنوعی بیشتری برای آموزش آماده کنیم، داده های واقعی بیشتری را می توانیم برای اعتبارسنجی و آزمایش تخصیص دهیم. این رویکرد ما را قادر میسازد تا مدلها را برای کاربردهای واقعی ارزیابی کنیم.
-
پیشرفت معماری DNN: در نهایت، یک نکته دیگر که شایستگی کاوش را دارد، اصلاح معماری است. معماری اصلی Pixel2Graph همه ویژگی های آموخته شده را در یک تانسور ویژگی ترکیبی ادغام می کند. تقسیم این تانسور به دو تانسور مجزا، با یک تانسور آموزش دیده برای تشخیص شی و دیگری برای تشخیص رابطه، و با دو تابع هزینه مجزا، راه دیگری را برای بهبود عملکرد تشخیص دو در یک فراهم میکند. اگرچه عملکرد مدل Loc-Cla-Rel هنوز به دقت کافی برای کاربردهای میدانی دست نیافته است، تلاش برای بهبود آن با توجه به مزایای ذاتی مدل تک شات دو در یک ارزش دارد.
۶٫ استفاده بالقوه از تشخیص رابطه بصری و سهم این مطالعه
همراه با نظارت بر مجاورت، تشخیص رابطه برای تشخیص خطر موثر مبتنی بر تماس شامل رباتها یا تجهیزات فعال ضروری است. با این حال، تشخیص رابطه – یک فرآیند استنتاج معنایی – مانند تشخیص اشیا ساده نیست و نیاز به درک کامل صحنه دارد. یکی از راههای ممکن برای دستیابی به تشخیص رابطه، کشف ویژگیهای چندگانه موجودیتهای مرتبط (مثلاً مکان، مجاورت، حالت، کنش و توجه) و سپس استنتاج رابطه آنها بر اساس این ویژگیهای جمعآوریشده از طریق یک منطق از پیش تعریفشده است. با این حال، این رویکرد چالشهای متعددی را از نظر امکانسنجی و پایداری واقعی آن، از جمله نیاز به روشهای سنجش چندگانه و تجزیه و تحلیل دادهها، ارائه میکند. علاوه بر این، توسعه یک منطق استنتاج مقیاس پذیر چالش برانگیز است زیرا رابطه بین دو موجودیت را می توان به روش های بی شماری تعریف کرد. با توجه به موارد فوق، نتایج بهدستآمده با تشخیص ارتباط بصری تکشات مبتنی بر DNN، که میتواند تشخیص رابطه را مستقیماً از یک تصویر واحد کامل کند، به عنوان یک معیار پایدار قابل توجه است.
تشخیص رابطه بصری تک شات، یا همراه با DNN تشخیص شی دیگر یا به تنهایی، می تواند راه حل موثری برای شناسایی دقیق خطرات تماس محور ارائه دهد. همانطور که قبلا ذکر شد، معقول است که یک رویداد را به عنوان یک خطر تنها در صورتی شناسایی کنیم که کارگر در مجاورت یک ربات/تجهیز فعال (مثلاً شعاع عمل یک ربات یا تجهیزات) بدون قصد همکاری باشد. اگر کارگر در نزدیکی ربات فعال شده باشد و قصد همکاری داشته باشد، چنین رویدادی را می توان با احتیاط مشخص کرد و اجازه داد همکاری بین کارگر و ربات (یا تجهیزات) ادامه یابد.
روش دیگر استفاده از مدل Loc-Cla-Rel برای نظارت بر مجاورت و تشخیص رابطه است. با گرفتن یک تصویر دوبعدی به عنوان ورودی، مدل Loc-Cla-Rel می تواند bboxes و کلاس های اشیاء هدف و روابط آنها را به طور همزمان خروجی دهد. این رویکرد میتواند فرآیند کلی تشخیص خطر (هم نظارت بر مجاورت و هم تشخیص رابطه) را با استفاده از تصحیح تصویر ساده خودکار کند. اشاره شد که آموزش مدل Loc-Cla-Rel به طور قابل توجهی چالش برانگیزتر از آموزش مدل OnlyRel است، که به تعداد بیشتری از داده های آموزشی نیاز دارد و به طور بالقوه نیاز به اصلاح معماری دارد. با این حال، ما دریافتیم که ارزش دنبال کردن بهبودهای بیشتر با هدف دستیابی به حداکثر پتانسیل عملکرد چنین مدل چند در یک را دارد، زیرا این مدل وعده می دهد که به طور قابل توجهی در هزینه های محاسباتی در پیاده سازی های تنظیم واقعی صرفه جویی کند.
با بهترین دانش ما، این کار اولین تلاش برای دستیابی به تشخیص رابطه بصری تک شات در حوزه ساخت و ساز است. مدل ما میتواند مستقیماً با نگاه کردن به یک تصویر، مانند یک سیستم بینایی انسان، روابط بین اشیاء هدف را استنتاج کند. همچنین میتوان آن را به راحتی با روشهای نظارت بر مجاورت مبتنی بر دید کامپیوتری بدون سختافزار اضافی ادغام کرد. ادغام نظارت مجاورت و تشخیص رابطه در یک مدل واحد، شناسایی دقیق خطرات ناشی از تماس را ممکن میسازد، که به نوبه خود همکاری ایمن و مؤثر و در نتیجه پایدار بین کارگران و روباتها (یا تجهیزات) را ممکن میسازد.
آخرین اما نه کم اهمیت، ما استفاده بالقوه از معماری DNN دو در یک را در مطالعات ساختوساز آینده برای پرداختن به دوقلوهای دیجیتال برجسته میکنیم. بسیاری از وظایف نظارت بصری سایت (به عنوان مثال، نظارت بر ایمنی، نظارت بر پیشرفت، و کنترل کیفیت)، یا وظایف دوقلوی دیجیتال، ممکن است شامل نیاز به وظایف بینایی متعدد، مانند تشخیص اشیا، تشخیص رابطه، تخمین وضعیت دوبعدی و سه بعدی و تقسیم بندی معنایی باشد. ، به یکباره ما تأکید می کنیم که معماری برای چنین وظایفی، به ویژه در مرحله استخراج ویژگی، چندان متمایز از یکدیگر نیستند. این نشان می دهد که امکان مدیریت چندین کار بینایی در یک معماری ترکیبی وجود دارد. در مقابل، اجرای این وظایف در مراحل جداگانه می تواند خطاهای تجمعی ایجاد کند و از نظر محاسباتی ناکارآمد باشد. بر اساس این مزیتهای بالقوه و نتایج بهدستآمده در این مطالعه، تحقیقات بیشتر در مورد راهحلهای چند در یک، بهویژه برای مطالعات دوقلوسازی دیجیتال ضروری است.
۷٫ نتیجه گیری
اتوماسیون رباتیک و دیجیتالی شدن به مرکز نوآوری در ساخت و ساز تبدیل شده است. پیش بینی می شود در آینده نزدیک انواع ربات های ساختمانی در سایت های ساخت و ساز واقعی مستقر شوند. در حالی که مزایای راهحلهای رباتیک بسیار زیاد خواهد بود، چالش تضمین ایمنی کارگران صحرایی بهعنوان یک محدودکننده نرخ اولیه برای پذیرش صنعت عمل خواهد کرد. کارگران ساختمانی در فرآیند ساخت و ساز نقش اساسی دارند و حتی در یک محیط ساخت و ساز رباتیک بسیار خودکار نیز به همین شکل باقی خواهند ماند. ربات های سازنده نه تنها نیاز به تعامل و همکاری با کارگران در محل دارند، بلکه باید ایمنی کارگران را به شیوه ای پایدار تضمین کنند. برای این منظور، راه حلی برای شناسایی دقیق خطرات ناشی از تماس در فرآیندی که شامل شناسایی روابط بین موجودیت ها باشد، ضروری است. دستیابی به چنین راه حلی سهم اصلی این مطالعه است. عملکرد سه مدل در مجموعه داده آزمایشی – ۹۰٫۶۳٪ برای مدل #۱ (OnlyRel)، ۷۲٫۰۲٪ برای مدل #۲ (Cla-Rel)، و ۶۶٫۲۸٪ برای مدل #۳ (Loc-Cla-Rel) – چنین نیست. برای کاربرد میدانی کافی است با این حال، با در دسترس قرار گرفتن دادههای آموزشی بیشتر، و با پیشرفتهای مستمر در معماریهای جدید DNN، عملکردهای هزینه و مکانیسمهای آموزشی، پیشبینی میشود که مطالعات بعدی برای بهبود بیشتر پتانسیل عملکرد حداکثر در تشخیص رابطه بصری تک شات.
مشارکت های نویسنده
مفهوم سازی، DK، SL، VRK و ML. مدیریت داده، DK; تجزیه و تحلیل رسمی، SL; کسب بودجه، DK و SL. تحقیق، DK و SL. روش، DK، AG، VRK و ML. مدیریت پروژه، SL; منابع، DK; نظارت، SL; اعتبار سنجی، DK و AG. تجسم، DK; نوشتن-پیش نویس اصلی، DK; نوشتن-بررسی و ویرایش، DK، SL، VRK و ML همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده اند و با آن موافقت کرده اند.
منابع مالی
این تحقیق توسط جایزه بنیاد ملی علوم (NSF) (شماره IIS-1734266؛ “درک صحنه و نظارت پیشبینی برای همکاری ایمن انسان و ربات در محیطهای ساختمانی بدون ساختار و پویا”) و شورای تحقیقات علوم طبیعی و مهندسی از حمایت مالی شد. جایزه کانادا (NSERC) (کمک هزینه های تحقیق و توسعه مشترک، ۵۳۰۵۵۰-۲۰۱۸، “بهبود بهره وری مبتنی بر BIM برای صنعت ساخت و ساز کانادا”).
بیانیه هیئت بررسی نهادی
قابل اجرا نیست.
بیانیه رضایت آگاهانه
قابل اجرا نیست.
بیانیه در دسترس بودن داده ها
داده های ارائه شده در این مطالعه به درخواست نویسنده مسئول در دسترس است.
تضاد علاقه
نویسندگان هیچ تضاد منافع را اعلام نمی کنند.
منابع
- رباتیک ساخته شده ۲۰۲۳٫ در دسترس آنلاین: https://www.builtrobotics.com/ (دسترسی در ۲۹ مارس ۲۰۲۳).
- بوستون دینامیک. ۲۰۲۳٫ در دسترس آنلاین: https://bostondynamics.com/products/spot/ (دسترسی در ۲۹ مارس ۲۰۲۳).
- مک کینزی و شرکت. ظهور عصر پلتفرم: فصل بعدی در فناوری ساخت و ساز. ۲۰۲۰٫ در دسترس آنلاین: https://www.mckinsey.com/ (دسترسی در ۲۹ مارس ۲۰۲۳).
- AMR (تحقیقات بازار متفقین). آمار بازار رباتیک ساختمانی. ۲۰۲۱٫ در دسترس آنلاین: https://www.alliedmarketresearch.com/ (دسترسی در ۲۹ مارس ۲۰۲۳).
- BLS، اداره آمار کار، سرشماری صدمات شغلی مرگبار (CFOI). 2009–۲۰۱۸٫ در دسترس آنلاین: www.bls.gov/iif/oshcfoi1.html (دسترسی در ۲۹ مارس ۲۰۲۳).
- Jo، BW; لی، YS; کیم، جی اچ. کیم، DK; Choi، PH سیستم هشدار مجاورت و کنترل بیل مکانیکی برای جلوگیری از تصادفات. پایداری ۲۰۱۷، ۹، ۱۴۸۸٫ [Google Scholar] [CrossRef]
- نیول، آ. دنگ، جی. پیکسل به نمودارها با تعبیه انجمنی. Adv. عصبی Inf. روند. سیستم ۲۰۱۷، ۳۰. [Google Scholar] [CrossRef]
- آلبرت، آ. هالوول، ام آر. کلاینر، بی. تقویت تشخیص خطر ساخت و ساز و ارتباط با حافظه شناختی مبتنی بر انرژی و مدل بلوغ جلسه ایمنی: مطالعه پایه چندگانه. J. Constr. مهندس مدیریت ۲۰۱۳، ۱۴۰۰۴۰۱۳۰۴۲٫ [Google Scholar] [CrossRef]
- آلبرت، آ. هالوول، ام آر. کلینر، بی. چن، آ. گلپرور فرد، م. افزایش تشخیص خطر ساخت و ساز با مجازی سازی افزوده با وفاداری بالا. J. Constr. مهندس مدیریت ۲۰۱۴، ۱۴۰۰۴۰۱۴۰۲۴٫ [Google Scholar] [CrossRef]
- دونگ، XS؛ فوجیموتو، ا. رینگن، ک. استافورد، ای. پلاتنر، جی دبلیو. گیتلمن، جی ال. وانگ، ایکس. گزارش کمتر از آسیب در میان مؤسسات کوچک در صنعت ساخت و ساز. صبح. J. Ind. با. ۲۰۱۱، ۵۴، ۳۳۹-۳۴۹٫ [Google Scholar] [CrossRef] [PubMed]
- کیم، دی اچ. لی، SH; Kamat، VR پیشبینی مجاورت اجسام متحرک برای جلوگیری از حوادث ناشی از تماس در ساختوساز روباتیک. جی. کامپیوتر. مدنی مهندس ۲۰۲۰، ۳۴۰۴۰۲۰۰۲۲٫ [Google Scholar] [CrossRef]
- OSHA. اداره ایمنی و بهداشت شغلی، ایالات متحده ۲۰۱۱٫ در دسترس آنلاین: https://www.osha.gov/training/outreach/construction/focus-four (دسترسی در ۲۲ مه ۲۰۲۴).
- NIOSH. موسسه ملی ایمنی و بهداشت شغلی، رباتیک و ایمنی محل کار. ۲۰۲۱٫ در دسترس آنلاین: https://www.cdc.gov/niosh/newsroom/feature/robotics-workplace-safety.html (دسترسی در ۲۹ مارس ۲۰۲۲).
- کیم، دی اچ. لیو، ام. لی، SH; Kamat، VR نظارت بر مجاورت از راه دور بین منابع ساخت و ساز تلفن همراه با استفاده از پهپادهای نصب شده روی دوربین. با ماشین. ساخت و ساز ۲۰۱۹، ۹۹، ۱۶۸-۱۸۲٫ [Google Scholar] [CrossRef]
- تیزر، جی. Allread، BS; فولرتون، CE; Hinze, J. سیستم هشدار ایمنی مجاورت اپراتور تجهیزات و کارگران ساختمانی فعال در زمان واقعی. با ماشین. ساخت و ساز ۲۰۱۰، ۱۹، ۶۳۰–۶۴۰٫ [Google Scholar] [CrossRef]
- گروه PBE. 2022. در دسترس آنلاین: https://pbegrp.com/ (دسترسی در ۲۹ مارس ۲۰۲۳).
- AME. 2022. در دسترس آنلاین: https://www.ameol.it/en/egopro-safety/ (دسترسی در ۲۹ مارس ۲۰۲۳).
- KIGIS. 2022. در دسترس آنلاین: http://kigistec.com/ (دسترسی در ۲۹ مارس ۲۰۲۳).
- کیم، اچ جی; کیم، KN; ارزیابی ایمنی شی محور مبتنی بر ویژن Kim، HK با استفاده از استنتاج فازی: نظارت بر تصادفات با اجسام متحرک. جی. کامپیوتر. مدنی مهندس ۲۰۱۶، ۳۰۰۴۰۱۵۰۷۵٫ [Google Scholar] [CrossRef]
- کیم، KN; کیم، اچ جی; سیستم اجتناب از خطر ساخت و ساز مبتنی بر تصویر Kim، HK با استفاده از واقعیت افزوده در دستگاه های پوشیدنی. با ماشین. ساخت و ساز ۲۰۱۷، ۸۳، ۳۹۰-۴۰۳٫ [Google Scholar] [CrossRef]
- ردمون، جی. فرهادی، A. YOLOv3: یک پیشرفت افزایشی. arXiv 2018، arXiv:1804.02767. [Google Scholar]
- گوپتا، ا. جانسون، جی. Fe-Fei، L. ساواریس، اس. الهی، ع. اجتماعی GAN: مسیرهای اجتماعی قابل قبول با شبکه های متخاصم مولد. arXiv 2018، arXiv:1803.10892. [Google Scholar]
- کای، جی. ژانگ، ی. Cai, H. روش حافظه کوتاه مدت دو مرحله ای برای شناسایی فعالیت های ساخت و ساز از طریق نشانه های موقعیتی و توجهی. با ماشین. ساخت و ساز ۲۰۱۹، ۱۰۶، ۱۰۲۸۸۶٫ [Google Scholar] [CrossRef]
- بریلاکیس، مگاوات؛ پارک، جی. Jog, G. ردیابی خودکار بینایی نهادهای مرتبط با پروژه. Adv. مهندس آگاه کردن. ۲۰۱۱، ۲۵، ۷۱۳-۷۲۴٫ [Google Scholar] [CrossRef]
- معمارزاده، م. گلپرور فرد، م. Niebles، JC تشخیص دوبعدی خودکار تجهیزات ساختمانی و کارگران از جریانهای ویدئویی سایت با استفاده از هیستوگرام گرادیانها و رنگهای جهتیافته. با ماشین. ساخت و ساز ۲۰۱۳، ۳۲، ۲۴-۳۷٫ [Google Scholar] [CrossRef]
- پارک، مگاوات؛ Brilakis، I. تشخیص کارگر ساختمانی در فریم های ویدئویی برای مقداردهی اولیه ردیاب های بینایی. با ماشین. ساخت و ساز ۲۰۱۲، ۲۸، ۱۵-۲۵٫ [Google Scholar] [CrossRef]
- ژنوم بصری ۲۰۱۷٫ در دسترس آنلاین: https://homes.cs.washington.edu/~ranjay/visualgenome/index.html (در ۸ ژوئن ۲۰۲۴ قابل دسترسی است).
- نیش، Q. لی، اچ. لو، ایکس. دینگ، ال. لو، اچ. رز، TM; An, W. تشخیص استفاده غیر سخت با روش یادگیری عمیق از ویدیوهای نظارت میدانی دور. با ماشین. ساخت و ساز ۲۰۱۸، ۸۵، ۱-۹٫ [Google Scholar] [CrossRef]
- رن، اس. او، ک. Girshick, R. Faster R-CNN: به سمت تشخیص شی در زمان واقعی با شبکه های پیشنهادی منطقه. IEEE Trans. الگوی مقعدی ماخ هوشمند ۲۰۱۵، ۳۹، ۱۱۳۷–۱۱۴۹٫ [Google Scholar] [CrossRef]
- کولار، ز. چن، اچ. Luo, X. انتقال یادگیری و شبکه های عصبی پیچیده عمیق برای تشخیص نرده محافظ ایمنی در تصاویر دوبعدی. با ماشین. ساخت و ساز ۲۰۱۸، ۸۹، ۵۸-۷۰٫ [Google Scholar] [CrossRef]
- Px2 Graph. 2018. در دسترس آنلاین: https://github.com/princeton-vl/px2graph (دسترسی در ۳۰ آوریل ۲۰۲۴).
شکل ۱٫
تشخیص رابطه بصری مبتنی بر DNN.
شکل ۱٫
تشخیص رابطه بصری مبتنی بر DNN.
شکل ۲٫
سطوح مختلف دشواری کار: کم، متوسط و زیاد. رنگ سفید نشان دهنده اطلاعات داده شده و رنگ نارنجی نشان دهنده “تخمین زده شدن” است.
شکل ۲٫
سطوح مختلف دشواری کار: کم، متوسط و زیاد. رنگ سفید نشان دهنده اطلاعات داده شده و رنگ نارنجی نشان دهنده “تخمین زده شدن” است.
شکل ۳٫
معماری شبکه Pixel2Graph.
شکل ۳٫
معماری شبکه Pixel2Graph.
شکل ۴٫
مجموعه داده ساخت و ساز: نمونه هایی از تصاویر حاشیه نویسی شده.
شکل ۴٫
مجموعه داده ساخت و ساز: نمونه هایی از تصاویر حاشیه نویسی شده.

شکل ۵٫
Recall@5s از سه مدل مبتنی بر تنظیم دقیق و مجموعه دادههای آزمایشی.
شکل ۵٫
Recall@5s از سه مدل مبتنی بر تنظیم دقیق و مجموعه دادههای آزمایشی.
شکل ۶٫
Recall@5s مدل RelObj برای تشخیص رابطه در هنگام تنظیم دقیق.
شکل ۶٫
Recall@5s مدل RelObj برای تشخیص رابطه در هنگام تنظیم دقیق.
شکل ۷٫
نمونه های تست مدل Loc-Cla-Rel: طبقه بندی اشتباه و صحیح.
شکل ۷٫
نمونه های تست مدل Loc-Cla-Rel: طبقه بندی اشتباه و صحیح.
میز ۱٫
جزئیات مجموعه داده ساخت و ساز مشروح.
میز ۱٫
جزئیات مجموعه داده ساخت و ساز مشروح.
| دسته بندی ها | شرح |
|---|---|
| تعداد کل ویدیوها | ۱۵۰ |
| نرخ نمونه برداری تصویر | ۱/۳۰ (یک تصویر در ثانیه) |
| تعداد کل تصاویر حاشیه نویسی شده | ۱۲,۴۶۵ |
| تعداد کل اشیاء حاشیه نویسی شده | ۳۰,۱۵۳ |
| تعداد کل برچسب های حاشیه نویسی شده | ۱۷۷۷۲ |
| نسبت بین برچسب های همکار و غیر همکار | ۵۳:۴۷ |
|
سلب مسئولیت/یادداشت ناشر: اظهارات، نظرات و داده های موجود در همه نشریات صرفاً متعلق به نویسنده (ها) و مشارکت کننده (ها) است و نه MDPI و/یا ویرایشگر(ها). MDPI و/یا ویراستار(های) مسئولیت هرگونه آسیب به افراد یا دارایی ناشی از هر ایده، روش، دستورالعمل یا محصولات اشاره شده در محتوا را رد می کنند. |
منبع:
۱- shahrsaz.ir , پایداری | متن کامل رایگان | تشخیص رابطه بصری تک شات برای شناسایی دقیق خطرات تماس محور در ساخت و ساز دیجیتالی پایدار
,۲۰۲۴-۰۶-۱۴ ۰۳:۳۰:۰۰
۲- https://www.mdpi.com/2071-1050/16/12/5058
برای , بصری , پایدار , پایداری , تشخیص , تک , تماس , خطرات , در , دقیق , دیجیتالی , رابطه , رایگان , ساخت , ساز , شات , شناسایی , کامل , متن , محور
- دیدگاه های ارسال شده توسط شما، پس از تایید توسط تیم مدیریت در وب منتشر خواهد شد.
- پیام هایی که حاوی تهمت یا افترا باشد منتشر نخواهد شد.
- پیام هایی که به غیر از زبان فارسی یا غیر مرتبط باشد منتشر نخواهد شد.